ロボット教室 by ロボティズム&プラチナ構想ネットワーク(主催)
小学生を対象としたロボット教室で、国大のロボティズムサークルスタッフとプラチナ構想ネットワークのマイスターが、三菱みなとみらい技術館において「AI(人口知能)」{アクティブラーニング」「プログラミング」などまとめて体感できる教室の風景写真を掲載しています。
ロボット教室 横浜国立大学Robo+ism
横浜みなとみらい教室 Ⅱ No.008 2018年3月12日(月)
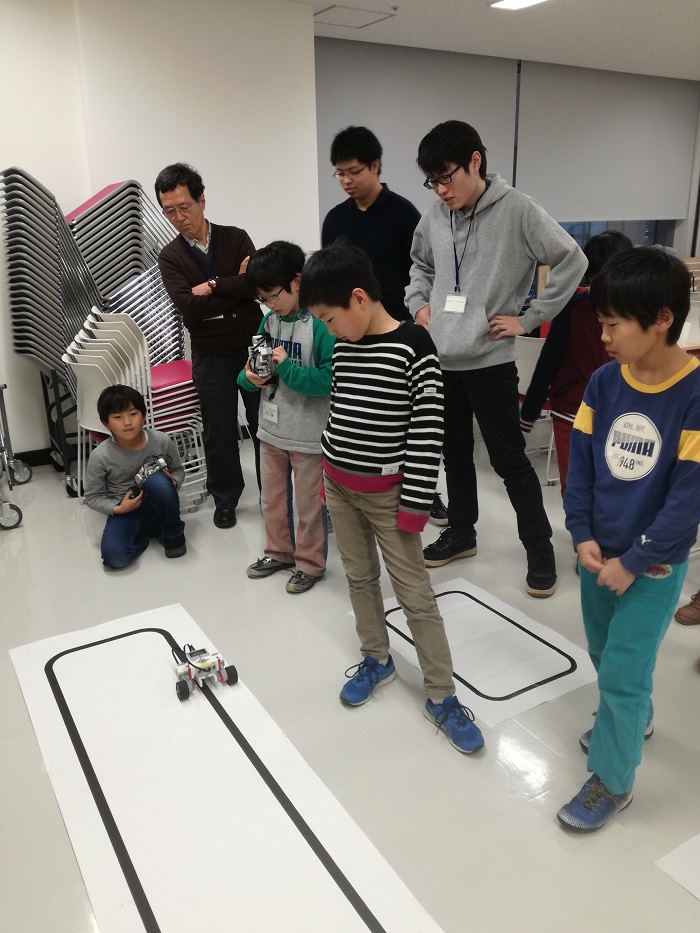
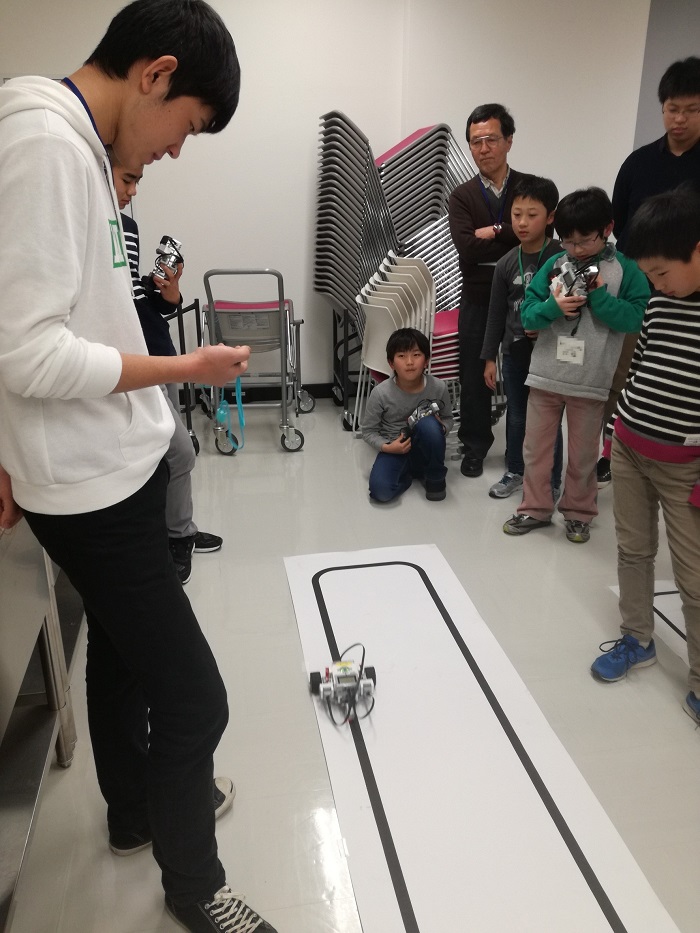
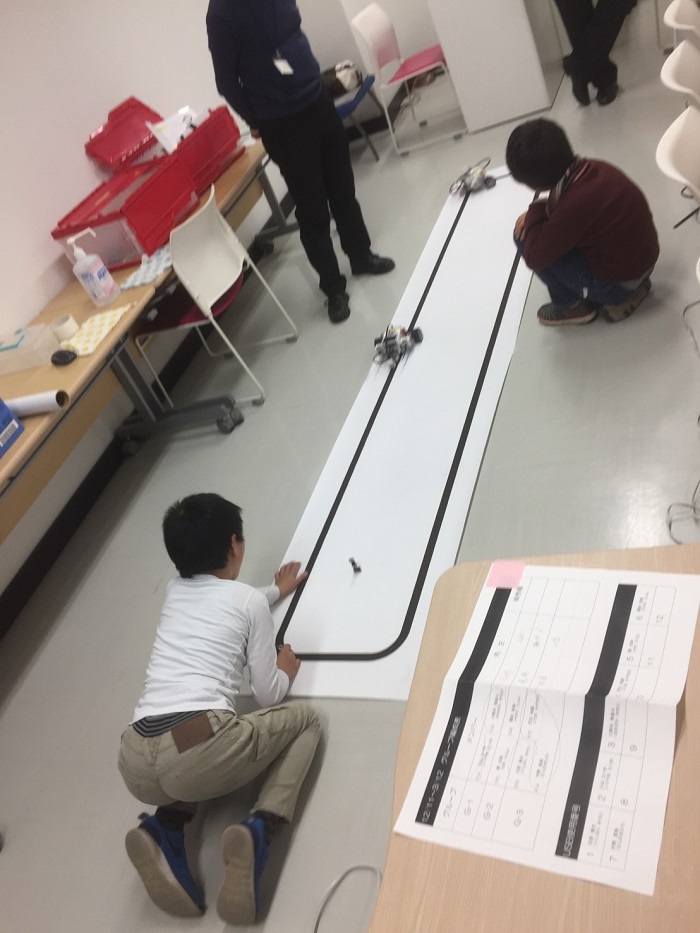
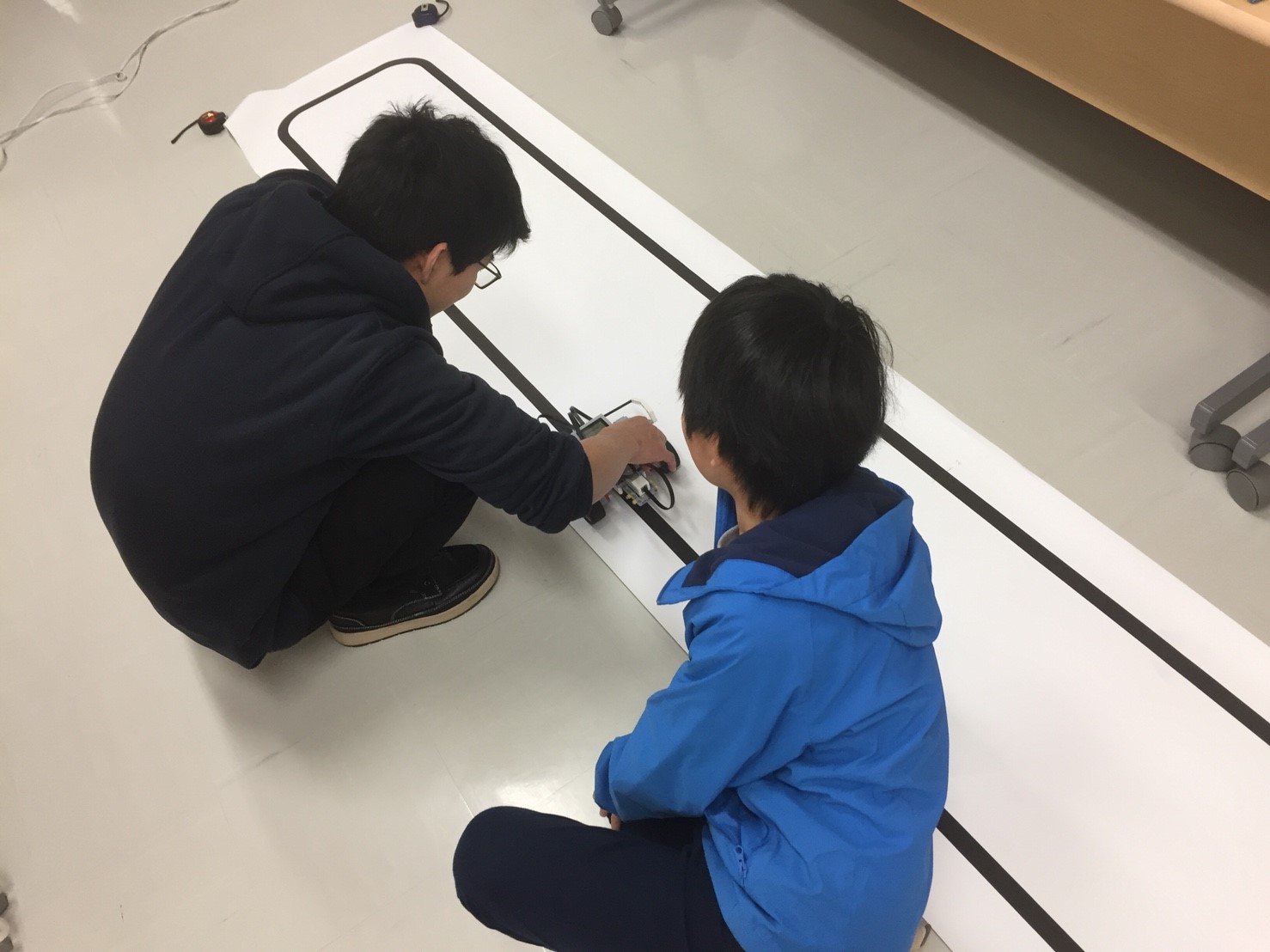
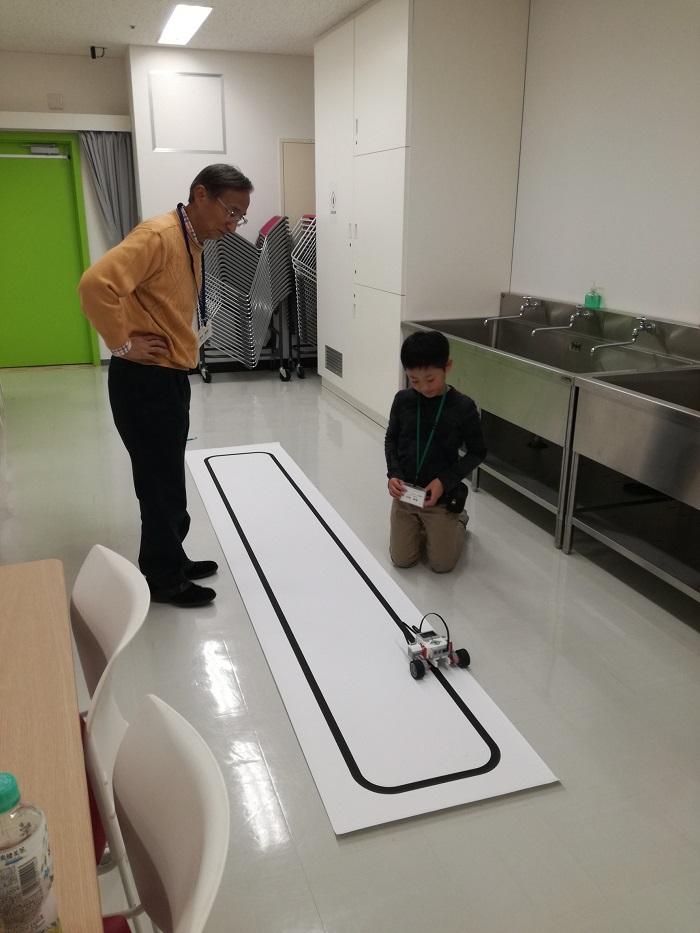
今日は、いよいよトレースレーサの競技会です。 白い紙に引かれた黒い線のコースをロボットがトレースしていき、一番短いタイムで一周できた人が優勝です。 ロボットのスピードを速くすると、コーナリングでコースアウトしやすくなってしまうので、スピードと安定感のバランスに今日まで、皆さん 悩まされてきました。 しかし、今日の競技会では、どの生徒も早いタイムでコースを一周することができ、接戦となりました。 生徒の皆さんの成長ぶりがよく感じられる、すばらしい競技会となりました。






横浜みなとみらい教室 Ⅱ No.007 2018年3月5日(月)
本日は、来週の競技会に向けて、最終調整を行いました。 また、今日は、新しく「並行処理」について学び、データログを取ります。データログを活用しながら、本番に向けてより細かな調整を繰り返しました。



横浜みなとみらい教室 Ⅱ No.006 2018年2月26日(月)
本日は、数学ブロックを使った制御について学びました。 これまでの授業では、ロボットの真下の地面が,白か黒かを判別し,どちらに曲がるかを決めていました。 今回は、白と黒の境界線とセンサーとの距離によって、モータの出力を変化させることで,より柔軟な動きを目指します。 以前は,黒線をまたいでジグザグしていたロボットが,滑らかで素早い動きができるようになりました。 先週まででも,十分にスムーズな動きをするロボットが何台もありましたが,生徒の皆さんは,今日でまた一段とレベルアップしたようです。

横浜みなとみらい教室 Ⅱ No.005 2018年2月5日(月)
今日のテーマも、前回に引き続き「データロギング」でした。 前回はカラーセンサーのログを取ることで、ロボットとコースの位置関係を確認しましたが、今回はさらにジャイロセンサーのログも同時にとって,ロボットの姿勢をそのままログとして保存できるようになりました。 前回と比べてロボットの動きをより考察しやすくなったようで,生徒の皆さんは今まで以上にチューニングがはかどっている様子でした。




横浜みなとみらい教室 Ⅱ No.004 2018年1月29日(月)
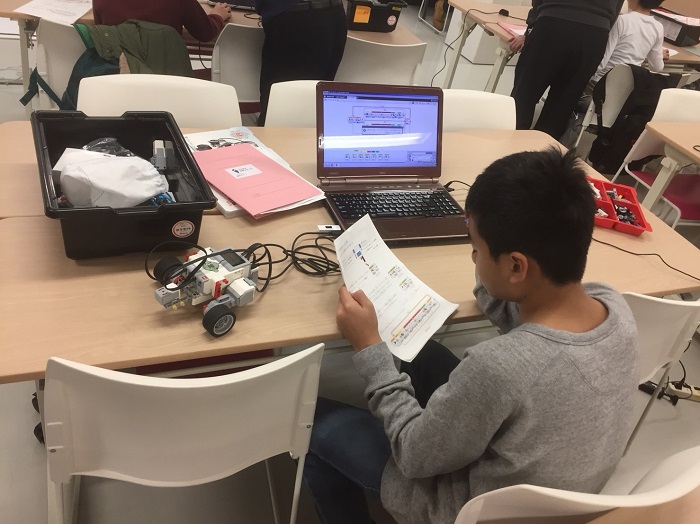
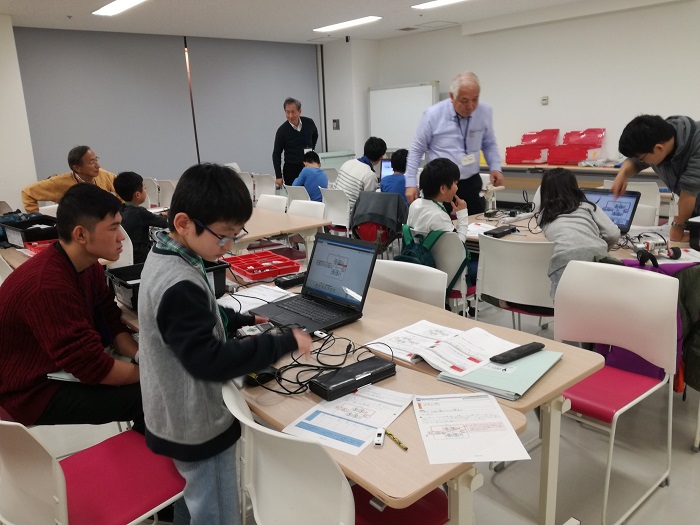
今回のテーマは,「データロギング」です。データーロギングによって、センサーで測定した値を、リアルタイムでファイルに書き出すことができます。 今までは、ロボットの動きを人間の目で見て、自分自身の感覚で、どのように調節すべきか考えていましたが、これからは、ロボットが実際にどのような動きをしていたのか、 具体的に数値で確認し、それを根拠に調整できるようになりましす。参加者のみなさんは、測定データをロボットに記録していく練習をし、ロボットのチューニング法として有効な方法を、習得することができました。




横浜みなとみらい教室 Ⅱ No.003 2018年1月15日(月)
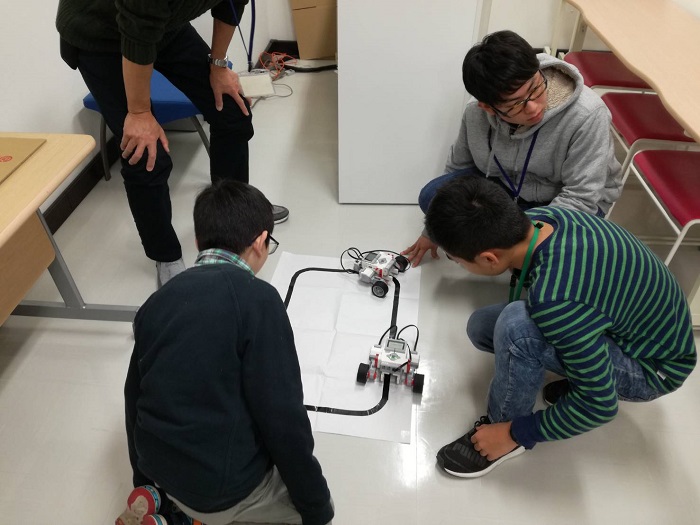
今回のテーマは,「しきい値」でした。しきい値とは,ある条件に当てはまるかを判定するための,境界となる値のことです。 ロボットに取り付けられたカラーセンサーで,白黒の判別を行うために,しきい値を計測します。 前回,すでにコースの上をうまく走るロボットがいくつもありましたが,しきい値を利用して,前回以上に完成度の高い動きを目指しました。 参加者の皆さんは,コースを走るロボットの様子を観察し,どうすればタイムが縮まるか,論理的に考え,何度も改良を重ねます。 友達とコース一周にかかるタイムを競い合い,夢中で取り組んでいる様子でした。





横浜みなとみらい教室 Ⅱ No.002 2017年12月18日(月)
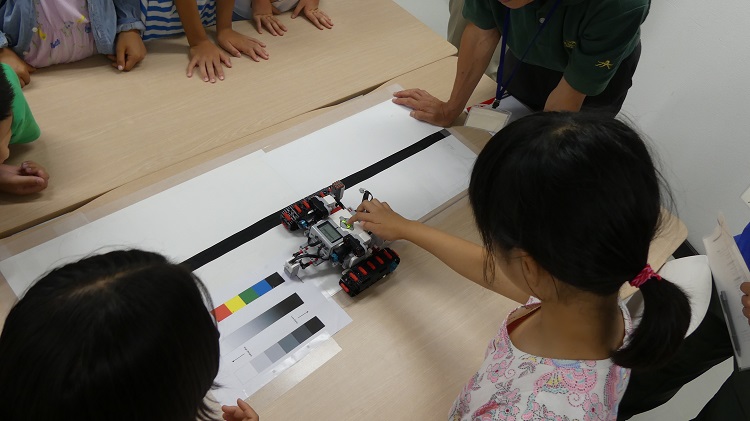
今回は、カラーセンサーについて学びました。 トレースレーサは、カラーセンサを使って、反射光の強さを測定することで、今、ロボットが黒い線の上にいるのかどうかを、判定することができます。 白は光を反射するので反射光が多いが、黒は光を吸収する色なので、反射光は少ない、といった、理科で学習した知識を、実感することができました。 ロボットの周囲の暗さや、センサーから地面までの距離などが変化すれば、反射光の大きさも変わるといったことも、実験を通して、体感しました。 子供たちにとって、カラーセンサ―についての理解を深めることができた回だと思います。





横浜みなとみらい教室 Ⅱ No.001 2017年12月11日(月)
今日は、最初に前回行った、すごろくロボットの競技会の表彰を行いました。 今期は、心機一転、「トレースレーサー」という、前期とはまったく違ったロボットの製作に取り組みます。「トレースレーサー」は、カラーセンサを用いて、地面に引かれたラインを読み取り、それをなぞるように動くロボットです。今日は、ロボットの組み立てと、フローチャートの作成、さらにプログラミングまで挑戦しました。 早くも完成度の高い動きを見せるロボットもあり、生徒の皆さんの成長ぶりが感じられました。ラインをなぞって動く、という制御は、現実の社会でも非常に有用なので、生徒の皆さんにとって、ロボットの便利さや必要性を、今まで以上に感じることができる、良い機会になると思います。






横浜みなとみらい教室 第8回 2017年11月20日(月)
今回は、先週に引き続き、協議会に参加するためのロボットのプログラミングをしました。先週作ったプログラムの欠陥を直したり、より良いプログラムに置き換えたりして、完成度を高めます。生徒の皆さんは、何度もロボットを動かしながら、試行錯誤を繰り返し、少しずつプログラムを改良しました。





横浜みなとみらい教室 第7回 2017年11月13日(月)
今回は、先週に引き続き、協議会に参加するためのロボットのプログラミングをしました。先週作ったプログラムの欠陥を直したり、より良いプログラムに置き換えたりして、完成度を高めます。生徒の皆さんは、何度もロボットを動かしながら、試行錯誤を繰り返し、少しずつプログラムを改良しました。




横浜みなとみらい教室 第6回 2017年11月6日(月)
今回は、いよいよ協議会に参加するためのロボットの動きをプログラムしました。これまで学んできた、センサーについての知識やフープ・スイッチなどの構造を活用して、プログラムをどんどん組んでいきました。今までに比べると、様々な要素を含む、複雑なプログラムになったため、一筋縄ではいきませんが、皆さん真剣に取り組んでいました。来週は、今回作ったプログラムの間違いを直したり、調整をしたりして、協議会本番にむけて、より完成度を高めていきます。




横浜みなとみらい教室 第5回 2017年10月30日(月)
今回は、プログラムを設計するための、フローチャートについて勉強しました。フローチャートを使って、プログラムの処理内容を書き出すと、処理の流れが、理解しやすくなります。ループ構造やスイッチ構造を使い、複雑なプログラムも表現できるようになりました。参加者の皆さんは優秀で、これらの構造をすぐに理解し、どんどん課題を進めることができました。



横浜みなとみらい教室 第4回 2017年10月23日(月)
今回は、超音波センサーについて詳しく勉強しました。超音波センサーを使うと、ロボットから物体までの距離を測ることができます。この仕組みを使って、障害物を回避するプログラムを作りました。参加者の皆さんは、何度もロボットを動かしながら、調整を繰り返し、最後には、思い通りに制御することができました。



横浜みなとみらい教室 第3回 2017年10月16日(月)
今回は、タッチセンサーや超音波センサーなど、様々なセンサーについて勉強しました。ロボットが、センサーを使って周囲の環境を読み取り、状況に応じた動作をするようなプログラムを作りました。先週よりみ難しい内容でしたが、参加者の皆さんは、試行錯誤しながら、うまくロボットを制御することができました。


横浜みなとみらい教室 第2回 2017年10月2日(月)
今回は、先週組み立てたロボットを動かすための、プログラムを作りました。簡単な前後進や旋回だけでなく、音が鳴るプログラムも組み合わせて、ロボットを制御しました。ロボットが期待通りの動作をすると、参加者の皆さんから、歓声が上がりました。



横浜みなとみらい教室 第1回 2017年9月25日(月)
横浜みなとみらいで行うロボット教室の初日でした。第1回目のテーマは、レゴマインドストームを使った、ロボットの組み立てです。参加者の皆さんは、お隣の友達と協力し合いながら、スムーズにロボットを組み立てることができました。「レゴで遊んだことがある」という子も多く、とても親しみやすかったようで、楽しかったという声がたくさん上がりました。



プラチナ未来構想ネットワーク・三菱重工株式会社・校友会 2017年7月24日(月)
9月から開講する「横浜みなとみらい教室(16回)」のプレイベントを開催しました。近隣の小学生が大勢集まり、「プログラミング」と「アクティブラーニング」の二つのキーワードを兼ね備えたロボット教室です。